Robots Mimic Animal Homing: Scientists Uncover How Animals Find Their Way Back Home
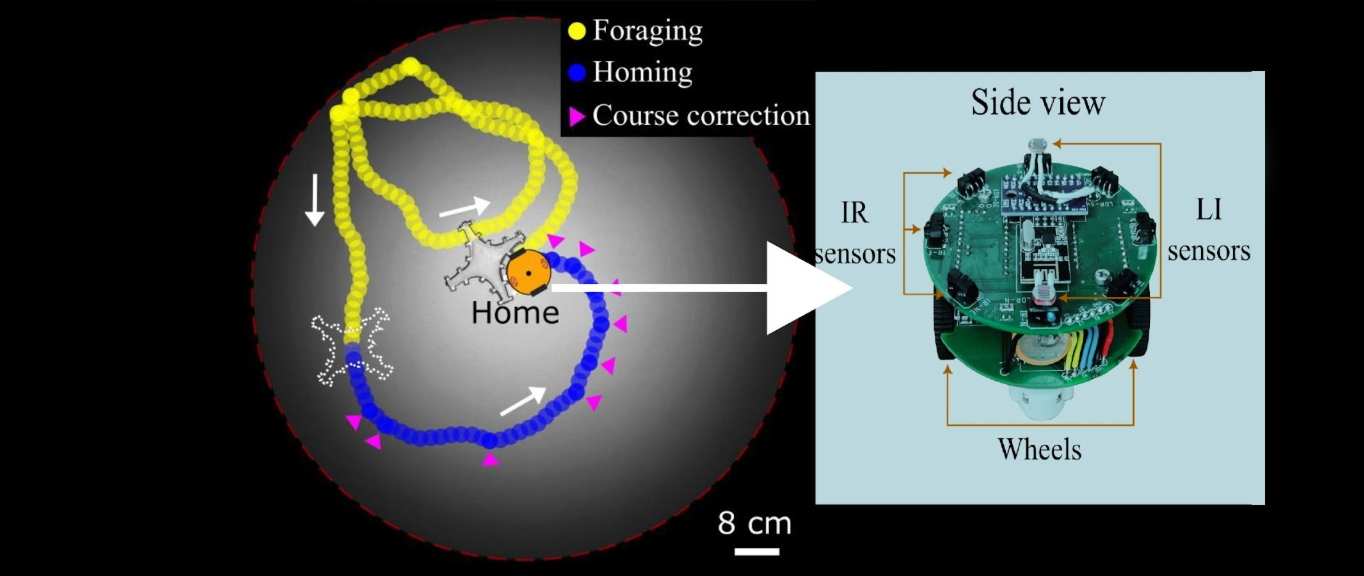
Path taken by the homing robot and a magnified view of the robot.
Image Credit: Dr. Nitin Kumar
The following article was originally written by Dennis C. Joy and published here.
Many members of the animal kingdom possess an incredible ability to find their way home from unfamiliar places, a skill known as homing. Whether it’s birds flying thousands of miles during migration or ants finding their way back to their colonies after foraging, homing is crucial for their survival. Humans have even harnessed this ability of the birds to train homing pigeons to deliver messages over long distances. But how do these animals always find their way home and how do they do it so efficiently? These and many other questions about this intriguing ability remain unanswered.
Researchers at the Indian Institute of Technology Bombay are using robots to unravel the mystery behind this fascinating phenomenon. “The primary goal of our research group is to understand the physics of active and living systems. We achieve this by performing experiments on centimetres-sized self-propelled programmable robots. In simple words, we model these robots to mimic the dynamics of living organisms, both at the individual and collective levels,” remarks Dr. Nitin Kumar an Assistant Professor at the Department of Physics at IIT Bombay.
Dr. Kumar’s team has now developed a robot that mimics the foraging and homing behaviour seen in animals. This robot is designed to move on its own, much like an animal finding food (foraging), and then to use light as a guide to return home (homing). In a new study, they have used this foraging and homing robot to study the underlying principles of homing.
The foraging robot is programmed to move in a semi-random manner, similar to how animals might wander around looking for food. This type of movement is called active Brownian (AB) motion, a computer model that mimics living dynamics. The robot’s direction changes frequently due to something called rotational diffusion, which introduces a certain level of randomness to its path. When the robot needs to return home, it shifts to a different mode. The researchers shine the robot with a light gradient (a gradual change in light intensity) which the robot is programmed to follow to find its way back. This mimics how some animals might use the sun or other environmental cues to navigate. “The homing motion is similar to the AB model, except the robot undergoes frequent course corrections whenever it deviates significantly from its intended homing direction, as expected in actual living organisms” explains Dr. Kumar.
For their study, the team wanted to determine the time it took for the robot to return home, with increasing amounts of deviations from its homing path. Ironically, they observed that the reorientation rate, which is the frequency at which the robot (or an animal) should adjust its direction for successful homing, originated from the degree of randomness in its path. They discovered an ‘optimal reorientation rate’ for a particular value of randomness beyond which the adverse effects of increased randomness are negated by more frequent reorientations, ultimately ensuring successful homing. This suggests that animals might have evolved to reorient themselves at an optimal rate to efficiently find their way home, regardless of the noise or unpredictability in their environment.
Talking about the findings, Dr. Kumar exclaims, “The observation of a finite upper limit on return times indicates that the homing motion is inherently efficient. Our results demonstrated that if animals are always aware of the direction of their home and always correct their course whenever they deviate from the intended direction, they will surely get home within a finite time.”
To back up their findings, the researchers built a theoretical model based on the concept of ‘first-passage time’. Simply put, this model helps predict how long it will take for the robot to reach home depending on its behaviour. The model was not only able to explain the robot’s experimental outcomes but also captured specific features of its homing paths, like how its orientation changes over time. The model could highlight the importance of reorientation as a strategy, showing that frequent course corrections are vital for efficient navigation.
Apart from physical experiments, the team also ran computer simulations where the robot’s movement mimicked animals. This virtual robot combined active Brownian motion with occasional resets to its orientation to correct its course back towards home. These simulations matched the experimental results, reinforcing the idea that randomness and reorientation work hand-in-hand to optimise homing. “When we applied this model to the trajectories of a real biological system of a flock of homing pigeons, it showed a good agreement with our theory, validating our hypothesis of enhanced efficiency due to frequent course corrections,” adds Dr. Kumar.
By mimicking the homing behaviours of animals, scientists have taken a significant step toward understanding the underlying principles. This study not only sheds light on how animals efficiently find their way home but also paves the way for technological advancements in robotics. Real-world navigation, however, involves more than just following a simple cue—it might include responding to changing landscapes, social interactions, and other environmental factors. “In real and more complex systems, the homing cues might be more complicated than a simple uniform gradient towards home, as modelled in our experiment. In our future research, we aim to model these scenarios in our experiment by using a combination of spatiotemporal variations in light intensity and physical obstacles,” concludes Dr. Kumar about the future direction of the research.
**********************************************************
The original article academic article titled Uncovering Universal Characteristics of Homing Paths using Foraging Robots was written by IIT Bombay’s researchers and was published in the journal PRX Life.
The original paper can be found here.